The polyhedral interface consists of several operators namely satisfiability test, inclusion test, projection, minimization, dual conversion, convex hull, intersection, difference and widening/narrowing. To perform each operator, many algorithms have been implemented. They can be used on integer or on rational domains to prove properties of programs. These algorithms often have a polynomial complexity but the worst-case exponential complexity hits sometimes. Unfortunately, this worse-case exponential complexity can block an analysis, especially when memory space and time are limited.
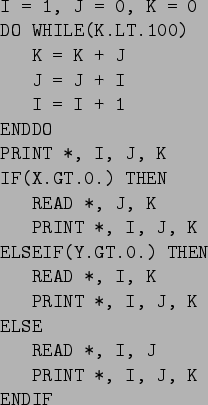
Adding information about a program should always result in more accurate analyses. It is however not true when 32-bit or 64-bit integers are used. When information is added, more overflows may occur in the linear algebra algorithms, then approximations must be made, resulting in longer and less accurate analyses. We take an example of a simple FORTRAN code, the polynomial in 6_fig:example_Polynomial03, and use PIPS to analyze this example.
|
|
The preconditions and transformers are computed to obtain information
about each variable ![]() independently for the tests on
uninitialized variables. A technique used in PIPS in order to obtain
more information is to compute several times the preconditions and
transformers using their previously computed results. It is
illustrated by the evolutions of transformers and preconditions in
6_fig:example_Polynomial03_pre and
6_fig:example_Polynomial03_tra where the results of four
iterations are displayed for one of the statement in
6_fig:example_Polynomial03 (see
the author's thesis for PIPS's transformers and
preconditions analyses).
independently for the tests on
uninitialized variables. A technique used in PIPS in order to obtain
more information is to compute several times the preconditions and
transformers using their previously computed results. It is
illustrated by the evolutions of transformers and preconditions in
6_fig:example_Polynomial03_pre and
6_fig:example_Polynomial03_tra where the results of four
iterations are displayed for one of the statement in
6_fig:example_Polynomial03 (see
the author's thesis for PIPS's transformers and
preconditions analyses).
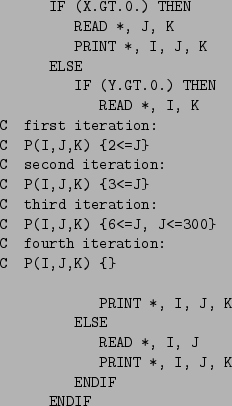
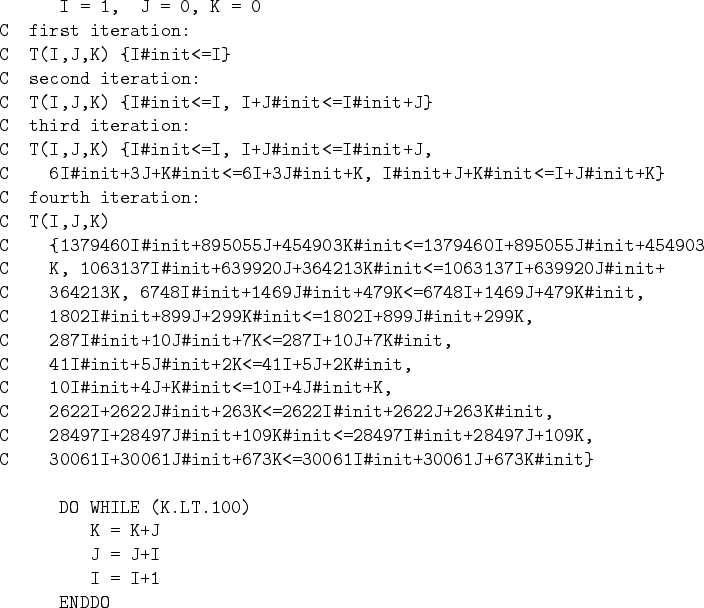
In 6_fig:example_Polynomial03_tra, we can see that the first
transformer only contains information about the variable ![]() and its
initial value:
and its
initial value:
![]() . The second transformer computed with
the first precondition gives information not only about the variable
. The second transformer computed with
the first precondition gives information not only about the variable
![]() , but also the variable
, but also the variable ![]() :
:
![]() . In the same way, the transformer computed the fourth
time seems richer of information than any previous one. However, if we
look at the 6_fig:example_Polynomial03_pre, everything seems
to be fine until the fourth loop: the information at the third loop,
. In the same way, the transformer computed the fourth
time seems richer of information than any previous one. However, if we
look at the 6_fig:example_Polynomial03_pre, everything seems
to be fine until the fourth loop: the information at the third loop,
![]() , is lost at the fourth loop. It is because an
overflow/magnitude exception has occurred.
, is lost at the fourth loop. It is because an
overflow/magnitude exception has occurred.
Let us take another example. With a hardware configuration PC
![]() GHz,
GHz, ![]() GB RAM, we analyze the program ocean.f with size
of
GB RAM, we analyze the program ocean.f with size
of ![]() LOC from the PerfectClub benchmark. We have
LOC from the PerfectClub benchmark. We have ![]() calls to
satisfiability test and
calls to
satisfiability test and ![]() overflows;
overflows; ![]() calls last longer than
three seconds and the largest constraint system contains
calls last longer than
three seconds and the largest constraint system contains ![]() constraints. In fact, the computation on polyhedra can be very
expensive: the larger the size of analyses becomes, the more problems
appear. Our motivation is to quantify these problems.
constraints. In fact, the computation on polyhedra can be very
expensive: the larger the size of analyses becomes, the more problems
appear. Our motivation is to quantify these problems.
Firstly, the operators manipulating the polyhedra at the lowest level should be the most efficient as possible. Note that in a typical program analysis section, an analyzer can call up to a hundred thousand elementary operations, or even more. Experiment shows that the impact is significant. It is however difficult to tell whether the implementations of these operators are efficient or not.
Secondly, heuristic-based approaches are thus needed to avoid
infinite precision arithmetic and to maintain an execution speed fast
enough to process large real applications reaching ![]() lines of
code, with hundreds of variables linked by hundreds of
constraints. The problem of time and memory space must then be reduced
as much as possible. Moreover, constraint coefficient magnitude is
also a complexity issue. Sub-optimal or heuristic solutions must be
found when arithmetic overflows occur, in order to limit or control
the information loss. Heuristics can only be found and validated
through experimentation.
lines of
code, with hundreds of variables linked by hundreds of
constraints. The problem of time and memory space must then be reduced
as much as possible. Moreover, constraint coefficient magnitude is
also a complexity issue. Sub-optimal or heuristic solutions must be
found when arithmetic overflows occur, in order to limit or control
the information loss. Heuristics can only be found and validated
through experimentation.
Finally, the dynamic behavior of programs is often controlled by integers, boolean variables and character strings. They can all be mapped on integers whereas linear algebra is mostly based on real and rational numbers, and linear algebra does not provide exact set operators very often. Different implementations of set operators by linear algebra algorithms can be exact, over- or under-approximation. Thus, accuracy and speed comparisons should be made.